



 Robocik na gąsienicach składa się z komputera pokładowego, dwóch silników i jednego czujnika. Zadaniem czujnika było sprawdzanie końca stołu, za który to koniec, nasz spychacz miał zepchnąć różne drobiazgi. To były nasze pierwsze zmagania z programowaniem robotów, dlatego najpierw czujnikiem który rozpoznawał kolory sprawdzaliśmy, gdzie jest czarna linia, a potem czujnikiem odległości - gdzie jest przepaść. Zmagania z oporną materią można obejrzeć na filmie.
Robocik na gąsienicach składa się z komputera pokładowego, dwóch silników i jednego czujnika. Zadaniem czujnika było sprawdzanie końca stołu, za który to koniec, nasz spychacz miał zepchnąć różne drobiazgi. To były nasze pierwsze zmagania z programowaniem robotów, dlatego najpierw czujnikiem który rozpoznawał kolory sprawdzaliśmy, gdzie jest czarna linia, a potem czujnikiem odległości - gdzie jest przepaść. Zmagania z oporną materią można obejrzeć na filmie.
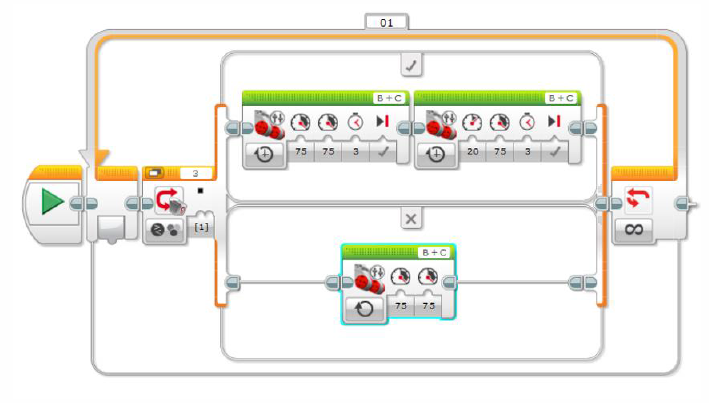
Programowanie w systemie nie jest zbyt skomplikowane i powinno być zrozumiałe dla każdego. Co więc robi nasz robocik? Wykonuje cyklicznie i bez przerwy następujące czynności:
- sprawdza czujnikiem koniec stołu (w naszym przypadki czarna linia)
- jeśli wykryje czarne, to się wycofuje i wykonuje obrót
- jeśli nie wykryje czarnego, to jedzie do przodu
I to by było na tyle.