




















- Odsłony: 4512

Spirograf, to urządzenie do kreślenia skomplikowanych krzywych matematycznych jak spirala, hipotrochoida czy epicykloida. Wynaleziony i opatentowany został w XIX wieku przez polskiego matematyka Brunona Abakanowicza. Nasze spirografy sterowane są przez trzy silniki i w zależności od szybkości obrotów wykreślają różnorodne spirale.
- Odsłony: 5104

Uczyliśmy roboty jeździć pomiędzy przeszkodami (nogi od stołów) i wykonywać skomplikowane figury akrobatyczne (pętle i ósemki), a także reagować na kolor i dotyk. Bawiliśmy się w „chłopców radarowców” wykorzystując sensor generujący ultradźwięki do pomiaru odległości od przeszkód. Wszystkie nabyte w trakcie zajęć umiejętności wykorzystane zostały do skonstruowania robotów bojowych, które stoczyły pojedynek na arenie złożonej ze szkolnych stolików.
- Odsłony: 2039

Pierwsze zajęcia CodeWeek już w czwartek 17 X 2019r. o godzinie 15.00. Zapraszamy chętnych na zajęcia z programowania robotów. Informacji udziela Wacław Libront.
- Odsłony: 1521


Na początku XX wieku produkowało się samochody wolno i drogo. Przy stanowisku pracowały niewielkie zespoły, które potrafiły w ciągu dnia zmontować kilka samochodów. W 1913 roku Ford wprowadza montaż taśmowy, co okazuje się rewolucyjnym pomysłem: auto zjeżdża z taśmy co 10 sekund, a cena jednego Forda T spada do 260 dolarów. W ciągu kilkunastu lat wyprodukowano ich 15 milionów.
- Odsłony: 1294





Żurawie dźwigowe zaliczane są do jednych z ja większych maszyn roboczych. Mogą osiągać wysokość do 100 metrów i udźwig do 80 ton. Żurawie wyposażone są z reguły w kilka silników: jeden napędza podwozie, kolejne obracają wysięgnikiem, przesuwają wodzak i realizują podnoszenie haka. Nasz żuraw ma jedynie pół metra wysokości, ale trzy sterowane komórką silniki realizują wszystkie zadania.
- Odsłony: 2653
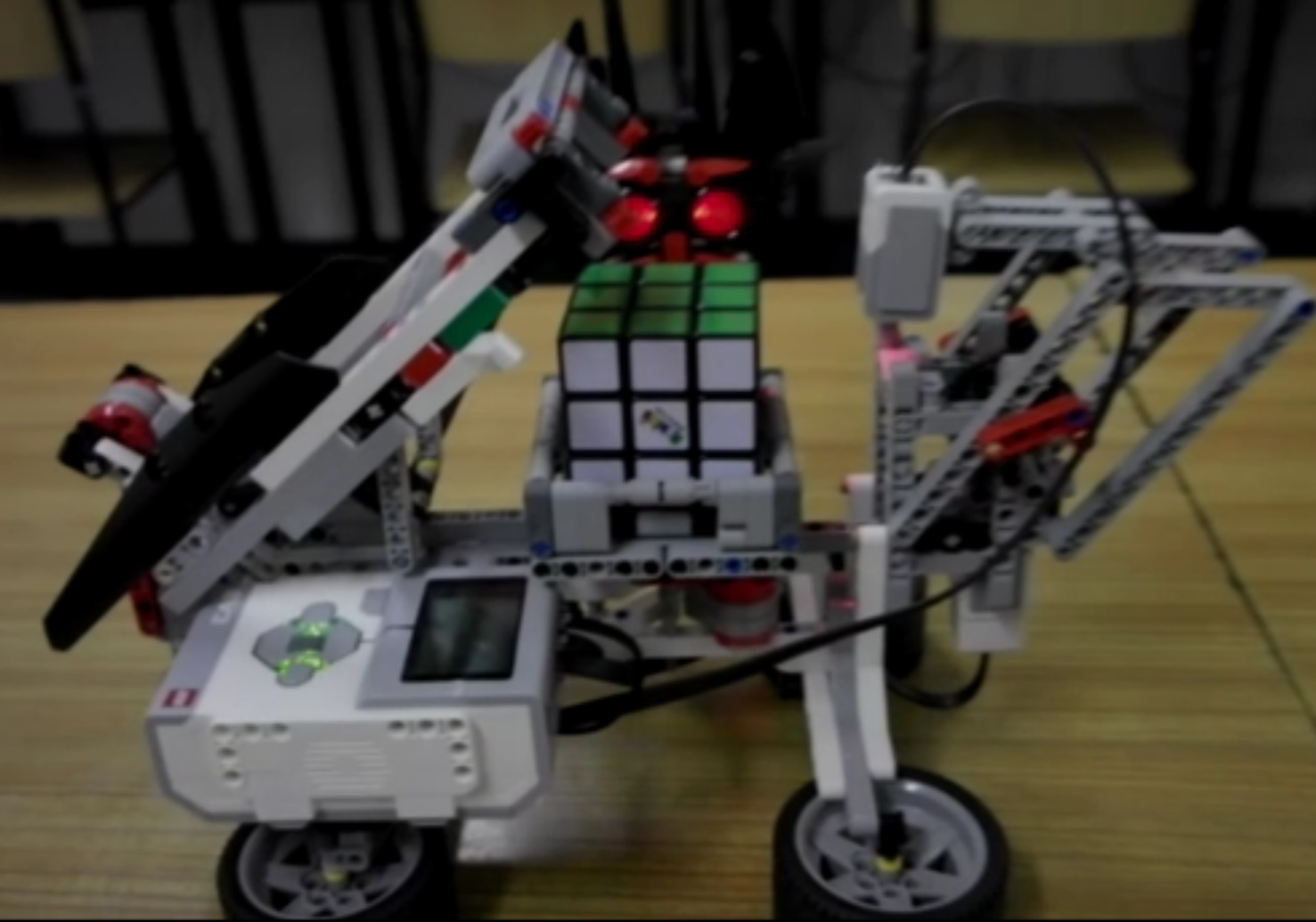 Kostka Rubika ma już ponad 40 lat! Twórca – węgierski inżynier Erno Rubik – układał kostkę po raz pierwszy przez cały miesiąc. Aby dzisiaj zostać rekordzistą trzeba ułożyć ją w czasie poniżej 5 sekund! Liczba możliwych kombinacji ułożeń kostki wynosi ponad 43 tryliony! (43 252 003 274 489 856 000), a zespół matematyków przy pomocy serwerów Google udowodnił w roku 2010, że kostkę można ułożyć w maksymalnie 20 ruchach! Notowane są również rekordowe osiągnięcia maszyn (w tym zbudowanych z klocków Lego). Obecny rekord wynosi 1,2 sekundy! Nasz szkolny automat układa kostkę nieco dłużej (w 20-25 ruchach) i miewa „humory”, gdy nie rozpozna kolorów.
Kostka Rubika ma już ponad 40 lat! Twórca – węgierski inżynier Erno Rubik – układał kostkę po raz pierwszy przez cały miesiąc. Aby dzisiaj zostać rekordzistą trzeba ułożyć ją w czasie poniżej 5 sekund! Liczba możliwych kombinacji ułożeń kostki wynosi ponad 43 tryliony! (43 252 003 274 489 856 000), a zespół matematyków przy pomocy serwerów Google udowodnił w roku 2010, że kostkę można ułożyć w maksymalnie 20 ruchach! Notowane są również rekordowe osiągnięcia maszyn (w tym zbudowanych z klocków Lego). Obecny rekord wynosi 1,2 sekundy! Nasz szkolny automat układa kostkę nieco dłużej (w 20-25 ruchach) i miewa „humory”, gdy nie rozpozna kolorów.
- Odsłony: 1627
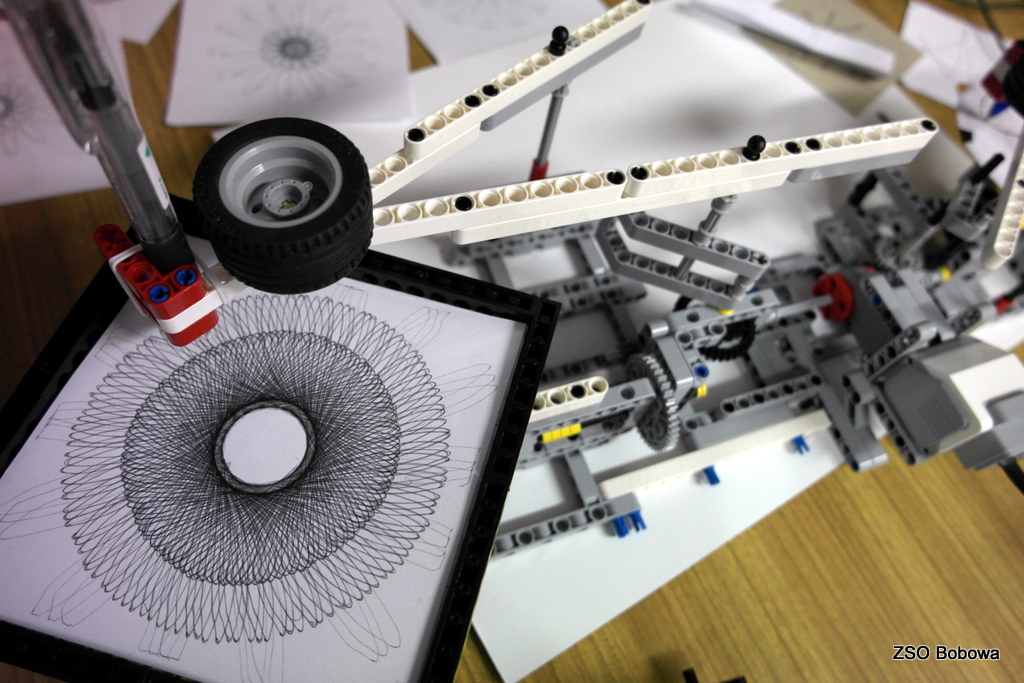 Zafascynowani możliwością kreślenia krzywych na arkuszu kalkulacyjnym - funkcja parametryczna i wykres punktowy - postanowiliśmy zrealizować to zadanie za pomocą "klocków". Powstało kilka projektów, mniej lub bardziej udanych i mnóstwo rysunków. Wersje stabilne "kręciołków" (nie rozsypały się) zostaną zaprezentowane szerszej publiczności w najbliższym czasie. W galerii fotki i filmiki.
Zafascynowani możliwością kreślenia krzywych na arkuszu kalkulacyjnym - funkcja parametryczna i wykres punktowy - postanowiliśmy zrealizować to zadanie za pomocą "klocków". Powstało kilka projektów, mniej lub bardziej udanych i mnóstwo rysunków. Wersje stabilne "kręciołków" (nie rozsypały się) zostaną zaprezentowane szerszej publiczności w najbliższym czasie. W galerii fotki i filmiki.
- Odsłony: 1224
 Ferie nie są czasem wolnym od myślenia. Kierując się tą zasadą, przyszli inżynierowie z bobowskiego Ogólniaka zorganizowali dla swoich młodszych kolegów z gimnazjum warsztaty, na których uczyli się trudnej sztuki zespołowego budowania robotów. Podczas kilkugodzinnych zajęć gimnazjaliści z Brzanej i Siedlisk montowali "potwora" poruszającego się na gąsienicach. Na zakończenie urządzono wyścigi - slalom pomiędzy nogami klasowych stolików.
Ferie nie są czasem wolnym od myślenia. Kierując się tą zasadą, przyszli inżynierowie z bobowskiego Ogólniaka zorganizowali dla swoich młodszych kolegów z gimnazjum warsztaty, na których uczyli się trudnej sztuki zespołowego budowania robotów. Podczas kilkugodzinnych zajęć gimnazjaliści z Brzanej i Siedlisk montowali "potwora" poruszającego się na gąsienicach. Na zakończenie urządzono wyścigi - slalom pomiędzy nogami klasowych stolików.
- Odsłony: 1995
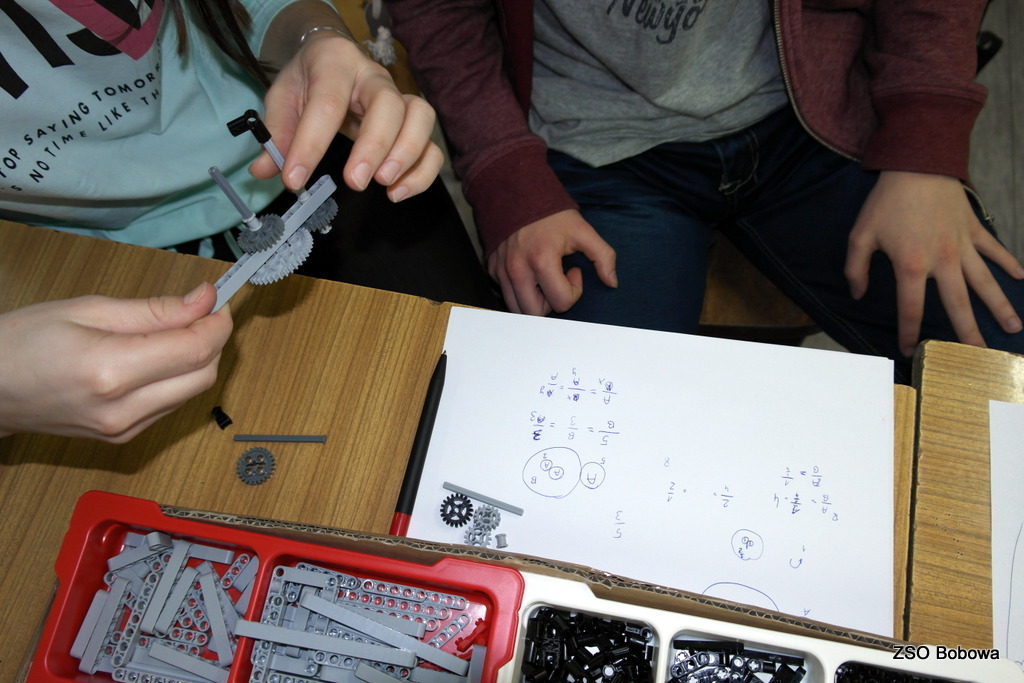 O zębatkach można pisać prace dyplomowe. Zewnętrzne, wewnętrzne, planetarne, o stałych osiach, równoległe, kątowe, wichrowane, walcowe, stożkowe, ślimakowe, śrubowe, daszkowe, łukowe... - mam wyliczać dalej? W naszym zestawie Lego EV3 nie mamy zbyt dużego wyboru, ale budowa nawet tych najprostszych układów przekładni zębatych może być ogromnym wyzwaniem dla przyszłych inżynierów. Cały problem sprowadza się nie tylko do matematycznego przeliczania ilości zębów na ułamki i "przekładania" nimi, ale do zbudowania takiej konstrukcji, która będzie stabilna i sztywna.
O zębatkach można pisać prace dyplomowe. Zewnętrzne, wewnętrzne, planetarne, o stałych osiach, równoległe, kątowe, wichrowane, walcowe, stożkowe, ślimakowe, śrubowe, daszkowe, łukowe... - mam wyliczać dalej? W naszym zestawie Lego EV3 nie mamy zbyt dużego wyboru, ale budowa nawet tych najprostszych układów przekładni zębatych może być ogromnym wyzwaniem dla przyszłych inżynierów. Cały problem sprowadza się nie tylko do matematycznego przeliczania ilości zębów na ułamki i "przekładania" nimi, ale do zbudowania takiej konstrukcji, która będzie stabilna i sztywna.
- Odsłony: 2336
 Roboty podążające za linią pracują najczęściej w skomputeryzowanych magazynach lub na zautomatyzowanych liniach produkcyjnych. Pokonują one określoną ścieżkę, w celu dostarczenia lub odebrania przedmiotów niezbędnych w trakcie produkcji. W naszym przypadku jest to czarna linia. Głównym zadaniem robota jest śledzenie linii za pomocą czujnika koloru i skręcanie kołami. Program również jest wyjątkowo prosty - instrukcja warunkowa sprawdza czy kolor jest czarny (skręcamy w lewo) lub czy jest biały (skręcamy w prawo). I takimi małymi zygzakami nasz robocik będzie przemieszczał się po wyznaczonej trasie.
Roboty podążające za linią pracują najczęściej w skomputeryzowanych magazynach lub na zautomatyzowanych liniach produkcyjnych. Pokonują one określoną ścieżkę, w celu dostarczenia lub odebrania przedmiotów niezbędnych w trakcie produkcji. W naszym przypadku jest to czarna linia. Głównym zadaniem robota jest śledzenie linii za pomocą czujnika koloru i skręcanie kołami. Program również jest wyjątkowo prosty - instrukcja warunkowa sprawdza czy kolor jest czarny (skręcamy w lewo) lub czy jest biały (skręcamy w prawo). I takimi małymi zygzakami nasz robocik będzie przemieszczał się po wyznaczonej trasie.
- Odsłony: 1823
 Duże koła, mocny silnik, niewielka masa i odpowiednia przekładnia - tyle wystarczy, aby wyścigówka była najszybsza. Dla inżyniera najciekawsza jest przekładnia: duża zębatka na silniku, mała na kole i uzyskujemy dużą szybkość... niestety kosztem mocy. Może zastosować przekładnię wielostopniową? Może mniejsze koła? Oto są pytania, na które spróbujemy odpowiedzieć. Wyścigówką steruje program, który pokazuje czas i zatrzymuje wyścigówkę przed metą (ścianą).
Duże koła, mocny silnik, niewielka masa i odpowiednia przekładnia - tyle wystarczy, aby wyścigówka była najszybsza. Dla inżyniera najciekawsza jest przekładnia: duża zębatka na silniku, mała na kole i uzyskujemy dużą szybkość... niestety kosztem mocy. Może zastosować przekładnię wielostopniową? Może mniejsze koła? Oto są pytania, na które spróbujemy odpowiedzieć. Wyścigówką steruje program, który pokazuje czas i zatrzymuje wyścigówkę przed metą (ścianą).
Strona 1 z 2