



 Roboty podążające za linią pracują najczęściej w skomputeryzowanych magazynach lub na zautomatyzowanych liniach produkcyjnych. Pokonują one określoną ścieżkę, w celu dostarczenia lub odebrania przedmiotów niezbędnych w trakcie produkcji. W naszym przypadku jest to czarna linia. Głównym zadaniem robota jest śledzenie linii za pomocą czujnika koloru i skręcanie kołami. Program również jest wyjątkowo prosty - instrukcja warunkowa sprawdza czy kolor jest czarny (skręcamy w lewo) lub czy jest biały (skręcamy w prawo). I takimi małymi zygzakami nasz robocik będzie przemieszczał się po wyznaczonej trasie.
Roboty podążające za linią pracują najczęściej w skomputeryzowanych magazynach lub na zautomatyzowanych liniach produkcyjnych. Pokonują one określoną ścieżkę, w celu dostarczenia lub odebrania przedmiotów niezbędnych w trakcie produkcji. W naszym przypadku jest to czarna linia. Głównym zadaniem robota jest śledzenie linii za pomocą czujnika koloru i skręcanie kołami. Program również jest wyjątkowo prosty - instrukcja warunkowa sprawdza czy kolor jest czarny (skręcamy w lewo) lub czy jest biały (skręcamy w prawo). I takimi małymi zygzakami nasz robocik będzie przemieszczał się po wyznaczonej trasie.
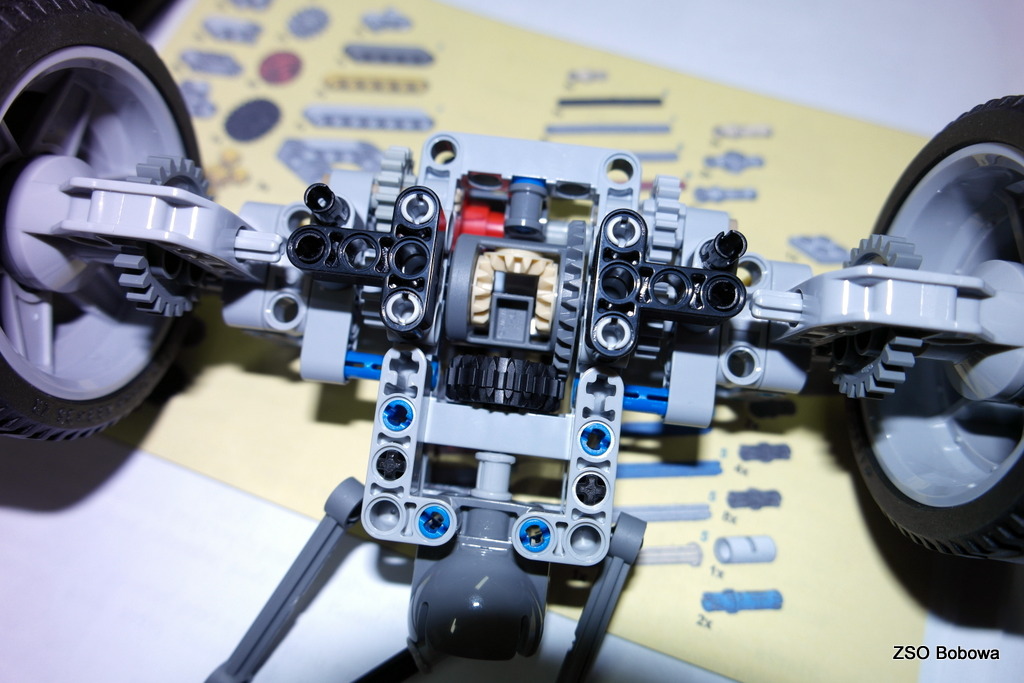 A teraz coś dla prawdziwych inżynierów i fanów motoryzacji, którą udało się przygotować "przy okazji" - mechanizm różnicowy, czyli dyferencjał.
A teraz coś dla prawdziwych inżynierów i fanów motoryzacji, którą udało się przygotować "przy okazji" - mechanizm różnicowy, czyli dyferencjał.
Druga część zajęć, to budowa robota, który pokonuje labirynty. Oczywiście wychodzenie z labiryntu nie ma nic wspólnego z myśleniem. Istnieje jednak bardzo prosty algorytm, dzięki któremu można przejść przez (prawie) każdy labirynt. Formuła brzmi następująco: "poruszaj się cały czas wzdłuż lewej ściany. Czujniekiem dotyku sprawdzamy czy na drodze ruchu znajduje się przeszkoda. Jeśli tak, skręcamy w prawo. Jeśli nie, sprawdzamy czujnik odległości. Gdy ściana, to obraca się w prawo. Po tych wszystkich sprawdzeniach wreszcie nasz robot może jechać do przodu. A sam program to nieskończona pętla i dwie instrukcje warunkowe.